Sidewinder X1のエクストルーダーをBMGに変えてみた
Sidewinder X1、ダイレクトエクストルーダーではあるんだけど使われてるのが titan なんすよね。
フィラメント送り出しギアが片側だけで反対はベアリングで抑えてる。
BMGは両側のギアでフィラメントをはみ込んで両側一緒に動いて送り出す構造。
prusaで使われてるエクストルーダーのギア、あれです、BMGってBondtechのやつなので同じギアなわけ。
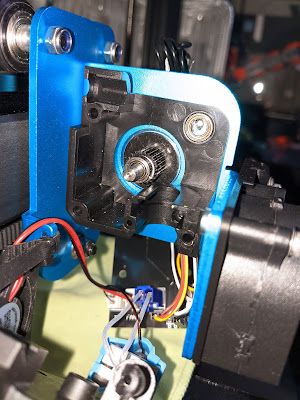
外観はこんなの

しかしだ、届いてから気がついたんだけど・・・、これノーマルのBMGでBMGにも何種類もあってヒートシンクが横につくタイプ、aeroとかwindってのがあるのね。
そしてsidewinder X1ではヒートシンクが横につくタイプを通常使う・・・。
またやっちまったかおれ?
まあ使えないこともなくて、ノーマルタイプのBMGを使うにはE3DのV6ヒートシンクを付けてその下にヒートブロックつけてノズルをつける。
prusaと同じっちゃ同じ。
V6ヒートシンクの予備持ってないから、買うか?なんかめんどいなあ。
さらにはヒートシンク分、下に結構伸びちゃうんだよね、どーしよ。
と、ここでマイナーながら面白い解決方法を発見。
EZ BMG Extruder mod for Artillery Sidewinder X1 by sprocketscientist - Thingiverse純正のエクストルーダー・ステッパーモーターのマウントを利用せずにBMGを上に付けてステッパーモーターも当然上に付ける。
そんでtitanのエクストルーダーの部品を抜いてヒートシンク・ファンはそのまま利用、ノズルもそのまま利用、ノズルファンもそのまま利用。
つまりは下はそのまま使えて上に伸ばす形になる。
この変な形のもの、これがtitanのエクストルーダーの部品を抜いた中に入れるダミーみたいなもの。

ちなみにV4対応バージョンってことで
こいつを印刷したもの。
ただし、自分の持っているのには微妙に合わず、結構リューターで削り込んで合わせた。
フィラメントの通り位置が2mmぐらい合わなかったのよね。

純正titanエクストルーダーのバラシ工程を適当に並べてく。
アイドラーレバー交換で一度バラしてて大体のコツは知ってたので良い予行演習になってたかな。



手前下(写真右下)のネジを外せばモーター外せる。
モーター、ギアはBMG用に交換が必要。


ヒートブロックのセンサー類、2本とも外して作業する。

ヒートシンクとノズル。






こっから組み立て工程。
難しくはない。
ちなみに間にかますやつは削り込んで合わせてある。

ただし、またもミスをしてる。

ヒートシンクから出てるPTFEチューブと間に噛ますやつのPTFEチューブを別々にしてしまってたんだわ。
ヒートシンクから出てるPTFEチューブうまく抜けなくて、抜かなくていいのかな?と思ってヒートシンク少し上で切って、間に噛ますやつからのPTFEチューブをちょっと出して位置が合うようにしてた。
だが正解はヒートシンクからPTFEチューブを54mm分出してそれを間に噛ますやつに通してやるのだよ。
あとでバラして修正することに。


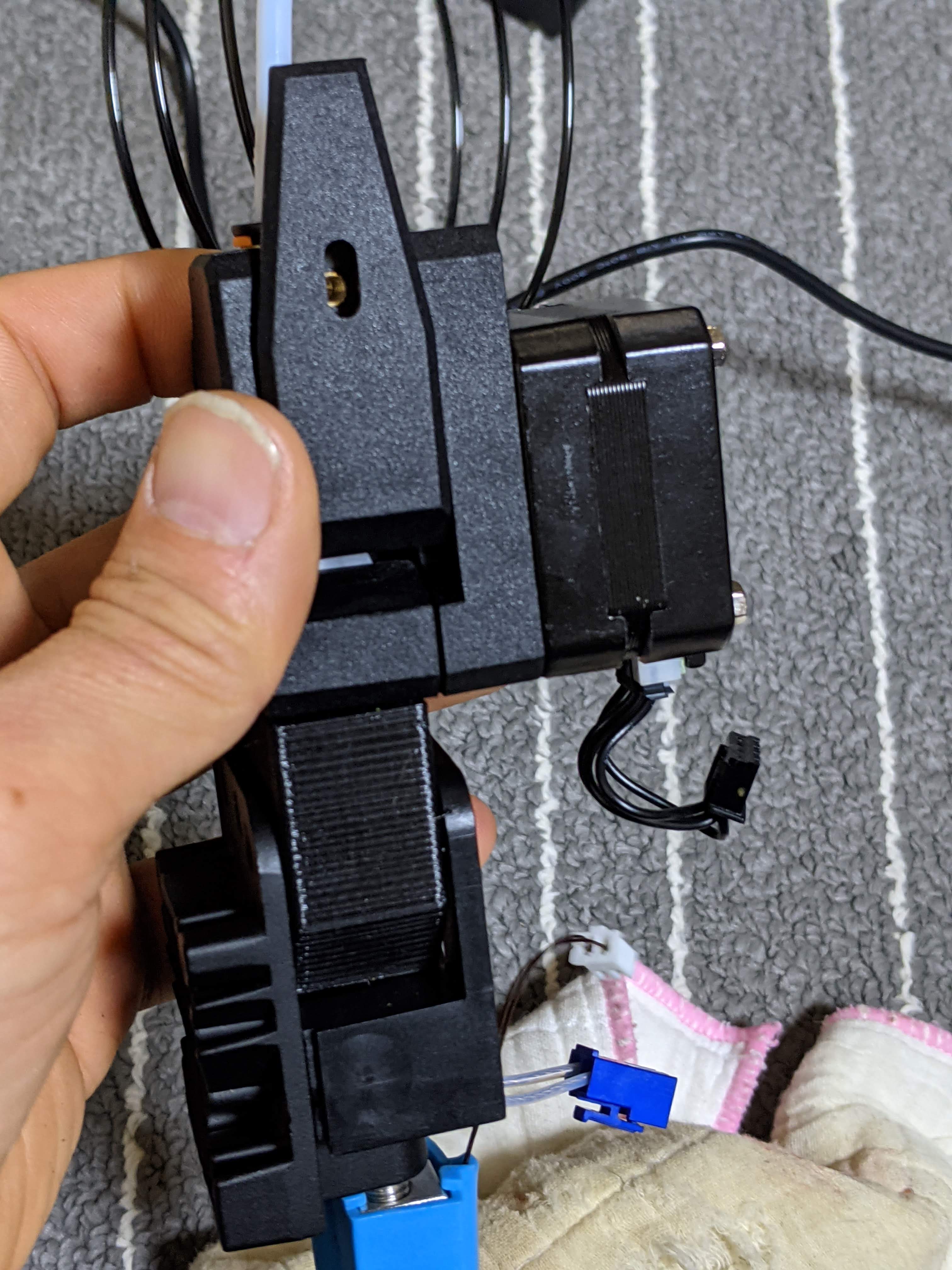
モーターのギアはBMGのものに交換、イモネジの位置はaliexpressのページにある説明に合わせた。

こっちが後でPTFEチューブを修正したもの

なお元々のギアにはイモネジなくて、力づくで取るしかない、ウエスで挟んでラジペンで引っこ抜きました。

そしてモーターまで組み付け、モーターはコネクターが下になるよう180度回す。

一応この状態でフィラメント通してきちんと通るか確認。
ただ、ここでも一箇所問題あり。
モーターとエクストルーダーの側面と直接当ててるけど、本来はここにマウントプレートが入ってるはずでその厚み分ネジが底づきして締めれないんだわ。
ということで後でモーターとエクストルーダーの間にワッシャー2枚噛ませて隙間を作るよう調整。
それに隙間があったほうがモーターの熱がエクストルーダーへ伝わるのを僅かでも減らせるだろうしね。
狭いけど難しいところはないかな。
元々モーターのネジで止めてたヒートシンクのネジをナットで受けるようにしてやったのと、接続基盤が宙ぶらりんになってしまうってことぐらいかな。


ハードウェアはここまで。


こっからはファームウェアっす。
BMGはtitanとはモーターの回転方向が逆になるのでファームウェアをコンパイルし直さないといかんのですわ。
まあモーターのコネクター逆に刺してやれば使えるらしいがコネクター壊すかピン外して入れ直すかすりゃあいけるらしいが電気配線いじるのやっぱり怖いんでソフト側で処置。
使うのはBLTouchでも使ったDtcreation/Firmware-Molise-Artillery
git で cloneして
vscodeにplatformio入れて
platformio.iniのdefault_envs = mega2560 にしてやって
Configuration.h のコメントアウトを外していって設定を作る。
ちょっと変わったこととして#define Z_STEPPER_AUTO_ALIGNを有効にしてやった、これでBLTouch使ってZ軸の左右モーターの高さによる傾きを補正してくれる、そのために上についているタイミングベルトは外しておかなきゃいけないわけだけど。
これでplatformioのタブに行ってtasks のDefault、General、Build Allでコンパイルできる。
コンパイルされたものは .pio\build\mega2560 にfirmware.hexとして保存されてる。
こいつをprusa slicerで書き込んでやればOK
無事動作(もちろん紆余曲折いろいろあったけどなw)

左BMG換装後、右BLTouchまでのもの。
エクストルーダーの出したり止めたりが頻繁ではないのであんまり差が出ないのかな?

いちおう、リトラクションのレスポンスとか上がってると期待して、リトラクション量とかを減らしてprusaと同等にしてみてる。
ただまあ、最初に戻るけどこの間に噛ますって使い方、決して良い解決策ではないよなとは思う。
極端言えばすごく短いボーデンタイプではあるわけで。
重量的にも余分なものが残ってる分不利ではあるし。
でもまあ悪くもないかな。
あ、そうそう上端は当たるかもしれないから気をつけたほうがいい、ほんとは上端のリミット設定を変更したほうがいいんじゃないかな、特にスプールホルダに当たるかもしれん。
あと、造形品質をあげられそうなところはZ軸のアンチバックラッシナットとリードスクリュとモーターとの接続部、あとノズルか。
とはいえ、けっこう満足できるレベルにはなったかなあ。
BLTouchとBMGで安心安定、感じるようになったもの。
まー、二日間家から出ずに夜中までずーっといじってりゃ物事進むわなあと。

